






After spending a day (with crayons!) designing a color scheme for our next model kit, we start airbrushing and painting the second Neil Winn monster sculpt. With some tips and guidance from Frank, our paint jobs are much improved! Follow along with us by signing up for a Tested Premium Membership here!
Research Tips – 6/23/2015

Tested Lessons: Painting Model Kits, Part 2

In the second day of this week’s tutorial, effects artist Frank Ippolito teaches us how to plan out and design a paint scheme for a model kit before jumping in with brushes. We discuss the use of real-world references to find a pattern that is suitable for the next creature kit. Follow along with us by signing up for a Tested Premium Membership here!
Tested Lessons: Painting Model Kits, Part 1

Time for more weeks of build! To kick things off, we’re joined by effects artist Frank Ippolito to learn some basic model kit painting techniques. Using cast blanks from talented sculptors Neil Winn and Andy Bergholtz, we learn how to get started with airbrushing and painting to bring some scale-model creature kits to life. Follow along with us by signing up for a Tested Premium Membership here!
Tested Meets the New BattleBots, Part 3
In part three of our interviews with the new BattleBots contestants, we check out the final eight robots competing in this series premiere! Some of the designs and strategies are very nontraditional and beautiful. Plus, we step inside the newly built BattleBots arena to learn what hazards the robots will face when they’re engaged in combat. The show premieres tonight at 9PM on ABC!
Shot and edited by Joey Fameli
Tested Meets the New Battlebots, Part 2

The new BattleBots is premiering this weekend, and we have exclusive access to the builders pit to check out the new combat robots. The new robots are spectacular; teams have new technologies at their disposal and are getting creative with their designs. We interview eight of the teams and learn their strategies for success in the arena!
Shot and edited by Joey Fameli
Hands-On: StarVR Virtual Reality Headset

A new challenger appears! Starbreeze Studios surprised us by announcing the StarVR headset at this year’s E3, along with a Walking Dead demo. We go hands-on with this virtual reality prototype that boasts a wide field-of-view and positionally tracked accessories. Even though this isn’t a consumer-ready product, there’s a lot to learn from its design decisions.
Shot and edited by Joey Fameli
Episode 306 – Tested Takes On E3 – 6/18/2015

This week, Will, Norm, and Jeremy break down the details of our trip to E3, including the latest on the consumer version of the Oculus Rift, the Oculus Touch, Sony’s latest Project Morpheus hardware and games, Starbreeze’s surprise wide-field of view VR headset, and Microsoft Hololens. Enjoy!
How To Make a Handheld Camera Gimbal Mount

There’s no question that motorized gimbals do a fabulous job of hiding the bumps and bobbles when you’re using an action camera. They’re pretty much required equipment for multi-rotor flyers who want to capture decent footage from on high. Recent reviews of the DJI Inspire 1 Mount and the Feiyu-Tech G3 Ultra convinced me that I needed a gimbal for my ground-based video shoots as well.
As I was browsing the selection of handheld gimbals, I ran across the Yuneec Steady Grip. Like the Inspire 1 Mount, the Steady Grip merely provides an alternate method to hold, power, and control a gimbal that would otherwise reside on a multi-rotor. The unique pistol-like form factor of the Steady Grip made me realize that I already had most of the parts that I needed to build my own handheld gimbal mount. So I abandoned the store-bought approach and went D-I-Y.

Gathering Parts
My prime motivation for this project was the desire to easily swap one of my gimbals between its aerial mount and the handheld mount. Being able to utilize a gimbal I already owned presented a substantial cost savings. Adding a gimbal to the bill of materials for this project would likely make it more expensive than just buying a handheld gimbal system outright.
I chose to use the GB200 2-axis gimbal from my Blade 350QX2 quad. The entire gimbal assembly can easily be removed from its mount on the quad by lifting a lock tab and sliding the base off of its rails. I had already upgraded the gimbal with the proper frame to hold a GoPro Hero 3 camera.
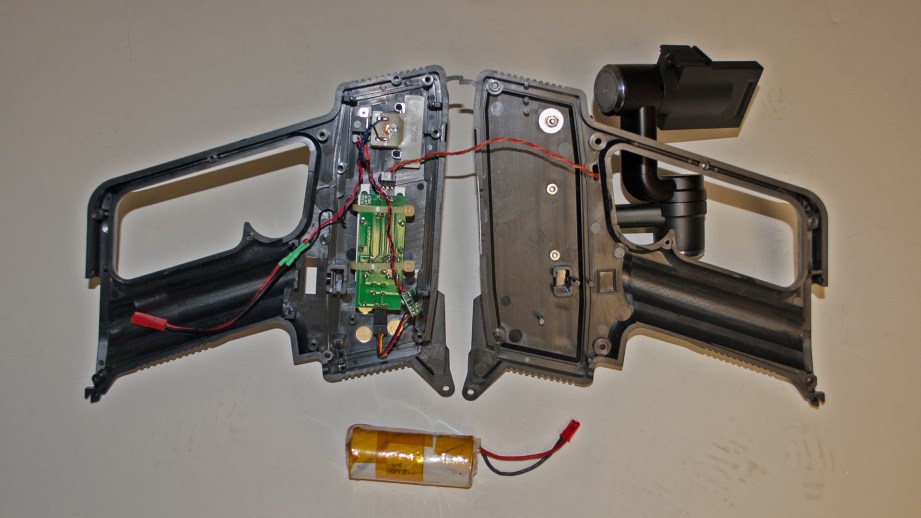
To emulate the style of the Steady Grip, I plundered my stash of old RC systems. Among them are several pistol-grip transmitters that I haven’t used in years. I located a well-used Futaba Magnum Sport that looked like it would do the trick. It didn’t matter that the electronics of the radio were still in good shape. I really only needed the plastic shell. Finding a new use for one of my squirreled-away “treasures” has certainly done nothing to improve my hoarding tendencies!

I wanted to be able to control the pitch of the gimbal while it is in the hand mount. On the quad, this function is controlled by a channel of the radio. I used a servo driver (also called a “servo tester”) to transfer this capability to the hand mount. I’ll explain later just how that works.
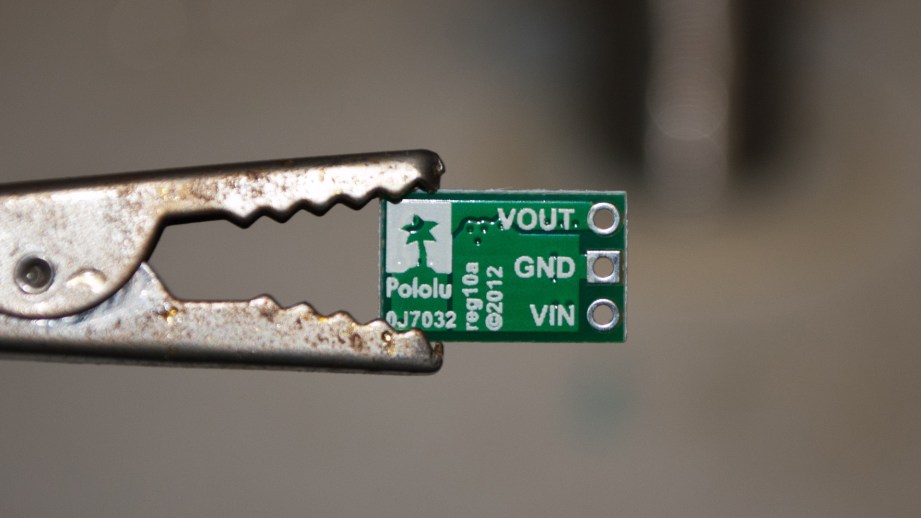
Different gimbals may require a wide variety of input voltages to operate. I wanted to be sure that I provided the correct voltage for the GB200, but I could not find any specs that defined what it should be. I measured the voltage output at the gimbal power pins on the Blade 350 at around 4.3 volts. With that value in hand, I felt comfortable buying a 5 volt voltage regulator for the hand mount.
As with most of my projects, I didn’t begin with a firm vision of the final product. This design was fluid right up until the last screw was tightened. To get started, I placed the basic parts before me and mentally explored the different options. Vanity usually takes a back seat to my desire for simplicity and functionality. Even though the simplest solution to a problem is quite often the best approach, it isn’t necessarily the most obvious. In fact, sometimes identifying and removing the superfluous stuff is the hardest part. I think that this project ended up sufficiently rudimentary.
Putting It Together – Wires First
I decided to tackle the electronic side of the project first. I began by gutting the components from the transmitter case. My plan was to just rip everything out, but I realized that I could recycle the power switch and voltage indicator rather easily. So those parts stayed in place
Next, I configured the servo driver. A servo driver is a device that allows you to operate a servo, ESC or other RC device without a radio system. It works by emulating the PWM (Pulse Width Modulation) signal that the device would normally receive when hooked to a radio receiver. You simply connect a 5 volt power source and the device to the servo driver. A potentiometer on the face of the servo driver allows you to articulate the device through its full range of motion. It’s a very handy and inexpensive tool to have in your workshop.

I purchased a $5 servo driver from Ready Made RC (RMRC) with the intent of permanently installing it in the hand gimbal mount and using it to provide pitch control. After some fiddling, I decided that I liked my new servo driver more than the Astro Flight model I’ve been using for over 10 years. My old one still works just fine, but the RMRC unit has a button that moves the device to the exact center of its travel range – a function I will use frequently. So I decided to keep the RMRC unit for my workshop and install the Astro Flight unit in the gimbal mount.
I connected the small plug of the GB200’s 3-wire harness to port C of the gimbal. This is the same plug configuration used with the quad, so you’ll want to buy or make a second harness to avoid having to move this part with every swap. The receiver plug of the harness was mated to the output side of the servo driver. With a 4-cell NiCad battery for power (just for this test), I performed a quick check to ensure that the servo driver would work with the gimbal as planned…it did. I removed the circuit board of the servo driver from its case and examined ways to mount it inside the transmitter body.
Using a combination of scrap plastic and zip ties, I was able to mount the servo driver board quite easily. Best of all, I located it such that the steering wheel of the transmitter connected to the output shaft of the potentiometer. This allows me to control the pitch of the gimbal by turning the steering wheel.

Anyone else attempting a similar project will likely be using a different transmitter case and servo driver. So the specifics of how I mated the potentiometer to the steering wheel are probably irrelevant. In short, I drilled an axial hole in the shaft of the steering wheel that matches the outer diameter of the potentiometer output shaft. The two parts are a relatively loose slip fit when pressed together. I could have glued or taped them together, but it isn’t necessary. I then mounted the servo driver board such that all of the parts are somewhat aligned (it isn’t perfect).
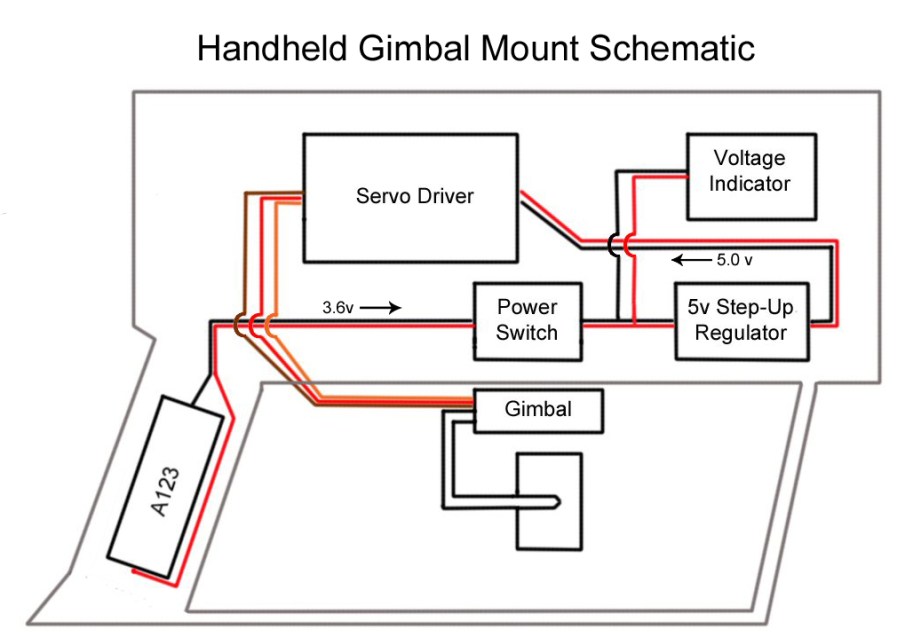
I have a lot of loose A123 Lithium Nanophosphate cells that I like to use for different projects. These cells are 3.6 volts when fully charged, so I was planning to use two cells in series (7.2v) with the aforementioned voltage regulator to knock down the system voltage to 5 volts. That plan changed when I came across a 5-volt “step-up” voltage regulator. Rather than throwing excess voltage overboard, this regulator takes a lower voltage input (as low as 2.5v) and pumps it up to 5v at the cost of increased current flow. Choosing this regulator allowed me to use a single A123 2300mAh cell.
The single A123 cell is a nice rattle-free fit in the original battery location inside the handle of the transmitter. I soldered a short lead with a JST power connector to the A123 cell. I also soldered the mating connector to wires leading to the stock power switch of the transmitter. I then connected wires from the output side of the switch to the input side of the voltage regulator. The output side of the voltage regulator received a standard servo plug that connects to the power port of the servo driver.
I also soldered jumpers from the output side of the power switch to the analog voltage indicator. It doesn’t indicate actual voltage, but rather a 0-100 scale, with 100 being fully charged. Knowing that the transmitter originally used batteries up to 12 volts, I figured that I would just have to recalibrate how I read the meter with my 3.6 volt input. I guess that the meter wasn’t reading raw input voltage from the battery because even 3.6 volts pegs it at 100. I’ll keep an eye on it as this battery depletes and determine if the meter will be useful at all.
Mounting the Gimbal
After lots of chin scratching, I decided that placing the gimbal on the left side of the transmitter case offered the most compact footprint. The first order of business was to cut off, sand, or otherwise flatten any protrusions in that area of the transmitter. I then bolted a 3.5″ length of aluminum angle stock in place. To this I attached a shelf made of ¼” plywood. I originally made the shelf of 1/8″ Kydex plastic, but it was too flexible.

A 2-sided Velcro strap is used to hold the gimbal to the shelf. I cut slots in the plywood that allowed me to loop the Velcro around the base of the gimbal. A small patch of adhesive Velcro on the bottom of the gimbal base prevents it from sliding under the strap. I also added strips of self-adhesive felt to the bottom side of the shelf to make the interface with the gimbal a little cushier. The final mount is surprisingly rigid, but the gimbal can be removed in a matter of seconds. So swaps between the quad and the handheld mount are easy.
I also wanted to add a clamp to hold my phone. Once again, I was able to borrow the needed part from my Blade 350QX2. This time, I pulled the phone clamp from the transmitter, which is fastened with a single screw. I drilled a .25″ diameter hole through the shelf and angle stock. Then I screwed the mount into place. Although I did have to source a longer 5mm diameter screw from my hardware stash.

The final assembly step was to add a base so that the gimbal mount could stand on its own. I cut a 4″x4″ plate of ¼” plywood and attached it to the bottom of the radio, being careful to leave the battery hatch unobstructed. The plate is secured using a combination of GOOP adhesive and self-tapping, flat head screws (I countersunk the screw holes).
Using the Gimbal Mount
My initial testing of the handheld gimbal mount has been encouraging. It definitely helps to smooth out the shakiness that is inherent when using a GoPro in your hand. This is especially evident when walking. My previous footage had significant bobbles each time my foot hit the ground. Now walking footage is much smoother. While not quite bounce-free, it’s definitely better. Perhaps I should learn to walk more stealthily when filming.
The balance of the unit isn’t bad. It is just a touch front heavy, so I don’t think it would ever cause a hand/wrist fatigue issue. The main problem I’ve encountered when using the hand mount is the latency of the Wi-Fi signal from my Hero 3 Black. Even though the camera and my phone are only inches apart, there is a 3-4 second delay with the image on my screen. I’ll have to look into solutions for that.
Another potential issue concerns the relative size of the handheld mount. Even when the gimbal is not installed, it’s much too large to fit into my camera bag. Short of strapping it to the outside of the bag, there may not be many transport options. That isn’t an issue for most of the filming I do, but I may have to keep the handheld mount at home during family vacations where space is limited.
Conclusion
Time will tell if this DIY design is practical enough to become my permanent non-flying gimbal mount. It has already provided an upgrade to my ground based GoPro footage. I’ll be using it a lot this summer to determine its strengths and weaknesses.
Even if I ultimately retire this gimbal mount, I only spent about $10 in new parts (servo driver and voltage regulator) to get it together. Most importantly, it was fun to envision this project and see it come together successfully.
Terry spent 15 years as an engineer at the Johnson Space Center. He is now a freelance writer living in Lubbock, Texas. Visit his website at TerryDunn.org and follow Terry on Twitter: @weirdflight
Building a District 9 Alien Rifle Replica, Part 1

Norm’s note: We’re super excited to announce a new collaboration project with Bill Doran (aka Punished Props) and Smooth-On. Over the course of this month, Bill is building a 1:1 scale replica of the alien assault rifle from District 9 to unveil with us at Comic-Con. Bill’s build logs and videos will walk through his design and fabrication process, and his finished piece will be paired with a surprise at SDCC. Place your questions for Bill in the comments below!
It’s no secret that I love me some space guns, and District 9 had some of the most incredible weapon designs from the mad geniuses over at Weta! Ok enough gushing, let’s dive into this build!
Design and Reference Material
The design for this gun was mostly based on the 1:1 replica that Weta released a couple of years ago, but I also took a lot of inspiration from the 1:4 scale replica that I have sitting on my desk. I took measurements from these sources and laid out the gun in SketchUp. The 3D design was layout in flat layers, in the thicknesses that I knew I would be using from the MDF wood stock.
Once all of the layers were designed, I was able to have them printed out, full scale, as 2D blueprints for each piece. These shapes were then spray glue adhered to flat MDF stock to prepare for cutting and gluing. The idea is that I can build up a prototype of the gun in layers, clean it up, and then mold and cast pieces for finishing.
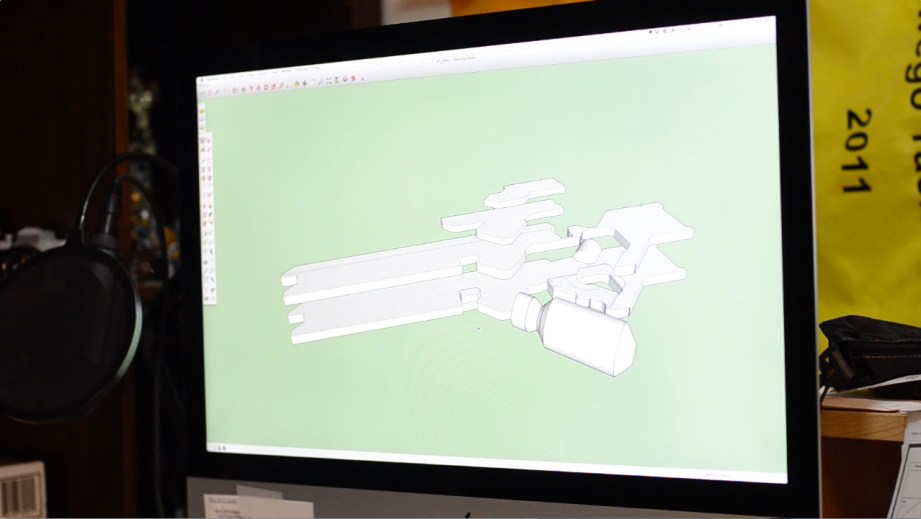
It took a lot of extra time to “build” the gun in SketchUp, but the effort was worth it. The blueprints I was able to print out made for a pretty fantastic kit, once all the parts were ready to be cut out. Also, I had already pretty much gone through the entire build once, planning it all out before even buying my material.
Build Materials: MDF and Styrene Plastic
MDF has been my go-to space gun building material for a long time. You can buy it from nearly any local hardware store, it’s fairly cheap, and it doesn’t have any pesky wood grain. It does get a bit fuzzy on the cut ends though, but we will deal with that in due time!

On a side note, I think it’s high time I graduated from MDF and use urethane tooling foam more often. Sure it’s more expensive, but it finishes so much nicer and you don’t have to deal with the fuzzy edges you get from MDF.
For this build, I also used some styrene plastic. Like the wood, you can get it in various thicknesses. I usually pick up a bunch from Tap Plastics here in Seattle, but you can also find it at your hardware stores disguised as “for sale” signs.
For adhesion I used your run of the mill wood glue for some of the larger MDF pieces, but my go-to adhesive for this kind of project is super glue.

Cutting & Sanding the Wood
With all of my design pieces glued down to their respective thicknesses of MDF, I was ready to go on a wood cutting binge. There were a variety of cuts to be made, so it was extremely handy to have several types of saw on hand to tackle each job. My workhorses are my scroll saw, band saw, and jig saw. A lot of the larger cuts were made with the bandsaw, in a fairly rough fashion, and then cleaned up on the disc sander. The internal cuts (like around the handle) and some of the trickier bits were done with a bit more precision on the scroll saw, requiring less clean-up.

For sanding, I also have a plethora of power tools to tackle each particular challenge. It’s hard to beat an oscillating spindle sander for those pesky interior, rounded edges around the handle. I also have a 1″ wide belt sander to handle some spots that needed a lot of wood removed, but were too tucked away to be handled with the disc sander.

I spent a good day or two cutting out and cleaning up the many pieces on the rifle. This is the kind of project where it pays off to have invested in a wide range of power tools to make life a little more bearable.

Creating Bevelled Edges
This gun has a whole bunch of beveled edges. To tackle them, I applied a two step method. First was to trim away as much of the material as possible with a saw. Then I could finish the edge with a hand file and sanding stick.
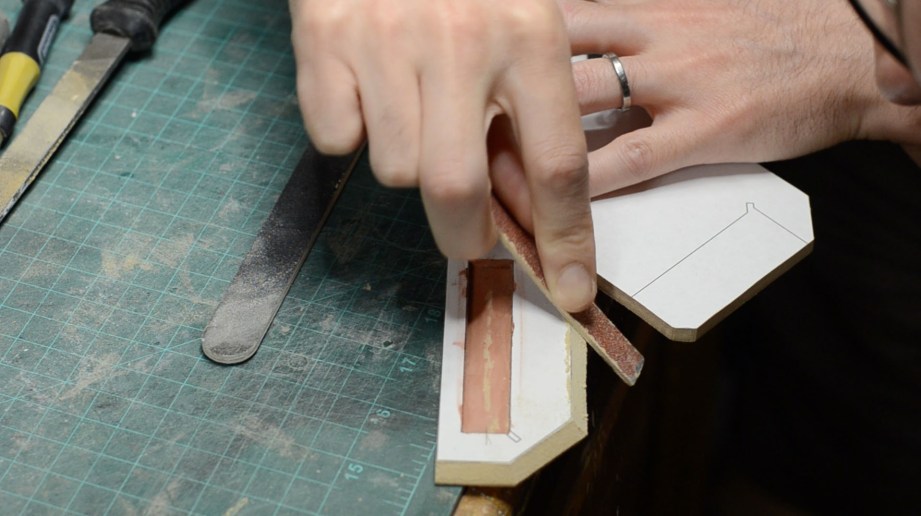
Trimming some of the bevels with the power saws was a little bit tricky. Fortunately my scroll saw and band saw each tilt to 45 degrees in opposite directions, so I was able to swap between the two to get the lion share of the material removed. The rest was done with elbow grease.
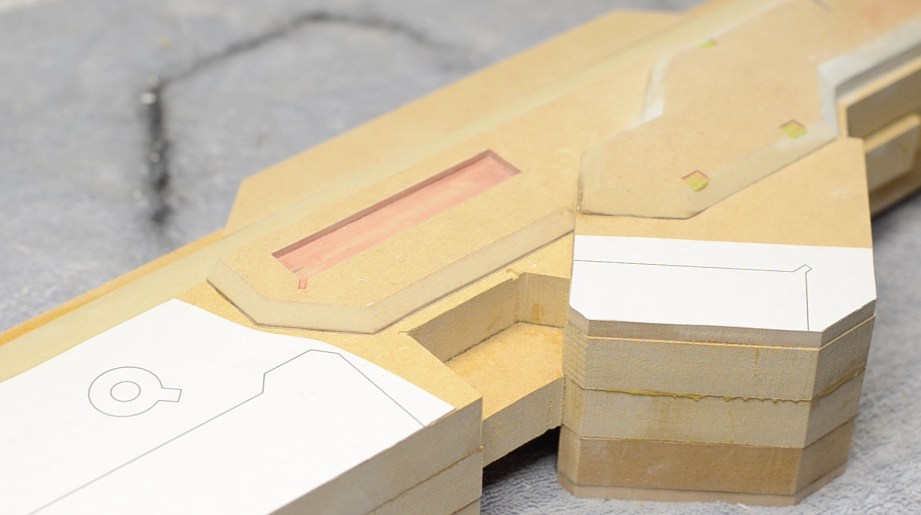
The very large bevels along the barrel (along the top of the gun where the row of tubes go) was different beast altogether. It was too big to fit in either of my saws, so it had to be trimmed with a hand saw. Time to invest in a bigger bandsaw!

Once they were glued together, some of the beveled edges required a bit of filling and sanding to get them looking right. I used a some body filler to get the job done. This is like a cure all finishing anything on a prop that didn’t get cut out perfectly!

I also trimmed out some of the smaller detail pieces using my drill press for round bits and an X-Acto knife for anything that had small, straight edges. Any surfaces that looked fuzzy were covered with some of that really thin (and in this case green) styrene plastic.
Gluing the Space Gun Sandwich
Finally after days of cutting and sanding, it was time to put this space gun sandwich together! The three big main pieces of MDF were wood glued together and served as a platform for the rest of the layers.

With the base shape prepped, I glued on the rest of the layers one at a time. These were tacked down with superglue. I really like super glue for this because it cures really fast and, if need be, can be sprayed with an accelerant to ensure that it will fully cure. This was one of the most fun parts of the build. It felt like putting together a model kit.
It’s impossible to line up these layers perfectly when gluing them together, so I ended up with some edges that had a bit of overlap. This is another instance where having several powered sanding tools saved the day. Sanding those surfaces flat by hand is possible, but sounds like a nightmare.

This entire process went on for a handful of days. Cut, cleanup, bevel, glue, repeat. The effort was worth it though, as the gun has made some significant progress! Next time, I’ll be showing you the process of lathing the cylindrical parts of the gun. I’ll also be prepping the pieces for mold making, so hold onto your butts, it’s gonna get crazy!
Find more of Bill’s work on his Punished Props website and YouTube channel.
Thanks to Smooth-On for providing materials for this build. Subscribe to their YouTube channel here.